Bionic Interactive Robotic Devices
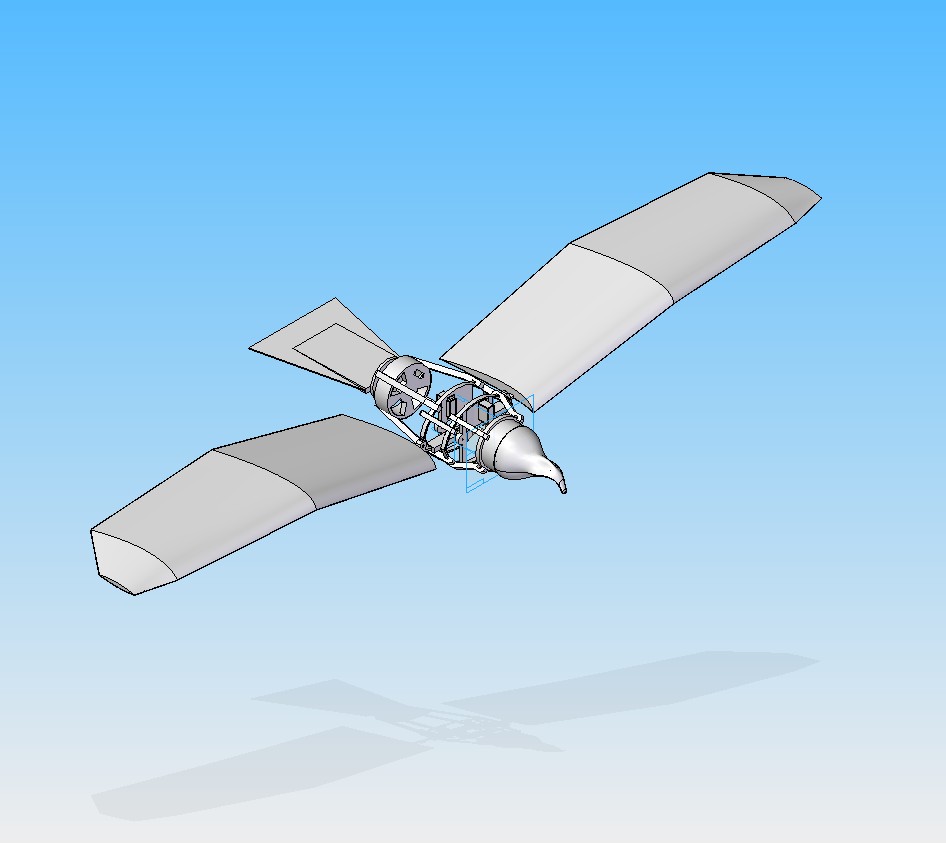
These are the development notes for a radio controlled flying model based on a golden eagle.
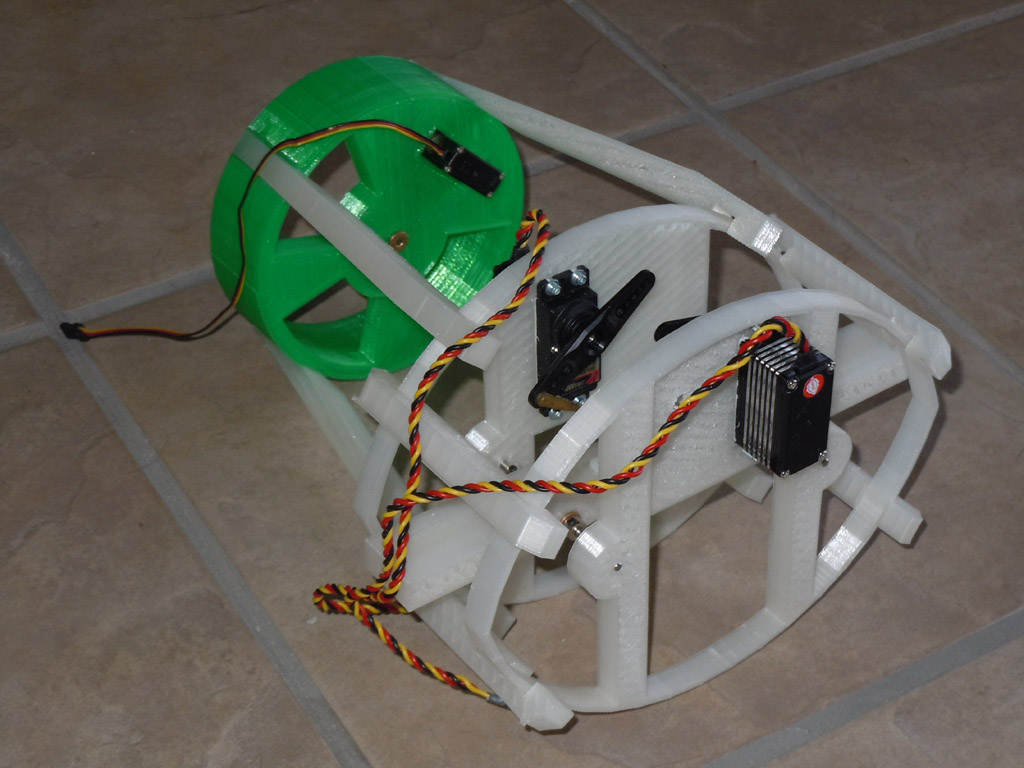
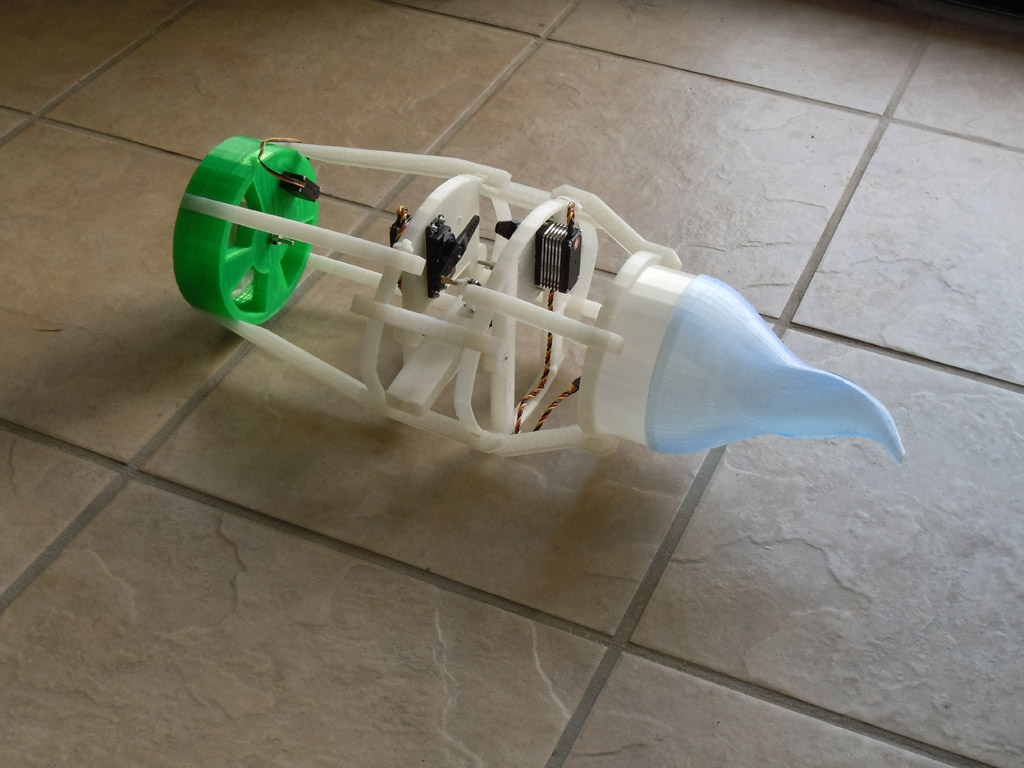
The wings are cut from foam and stiffened with square carbon fiber tubes. The body is constructed using 3D printing.
Powerful servos drive the wing motion using a custom microchip computer program that can flap at various rates and glide according to the throttle position.
The elevator and rudder operate as they would with any RC aircraft.
After trying several servos I found that a standard size high torque servo could barely lift the wings from a glide position. These servos were rated 130 oz./in.
I now have acquired standard size servos that can deliver 250 oz./in. @ 6V and 320 oz./in. @ 7.4V, or 20 lbs on a 1 inch arm.
The computer control sets the wing slightly above level for glide, up 15° for landing, and pulsed up 30° to down 30° back to glide. Full throttle is continuous full up to full down.
I found that the travel time between the two poles is so fast that the wings bounce at the travel limits. To resolve this I wrote a program to accelerate and decelerate the servo
at the travel limits by shaping the pulse width using a sine function. A full cycle occurs in 24 steps across a 1 second period.
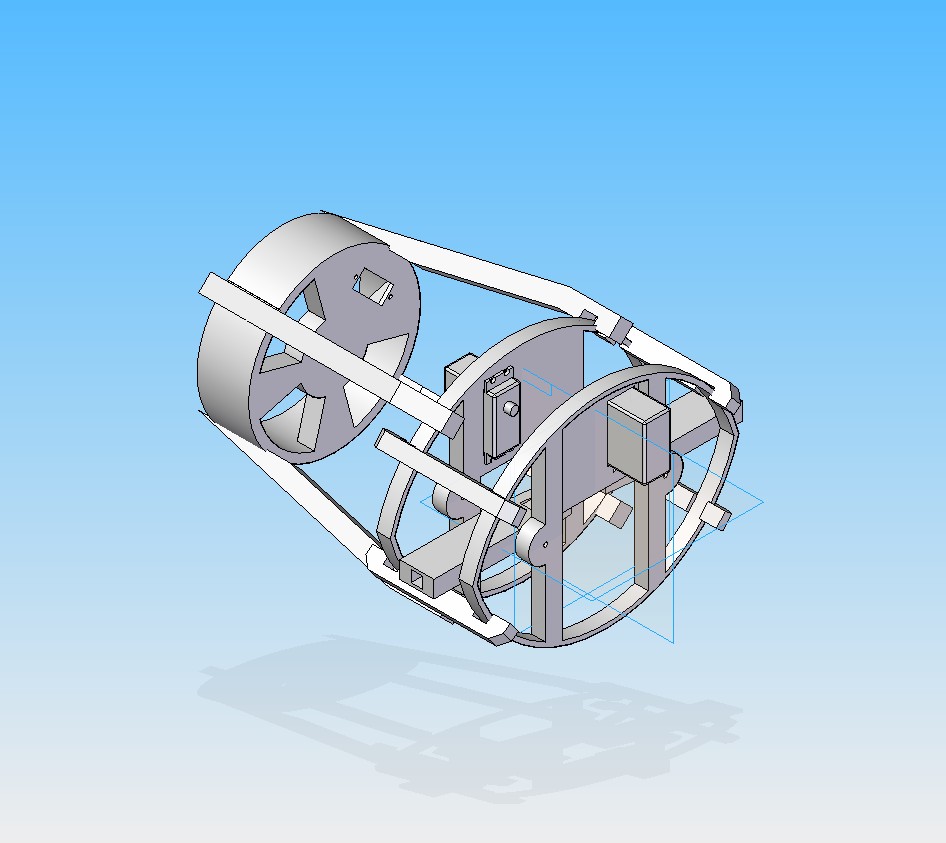
This is the 3D design model of the body framework.
This is the functional assembly for load testing. The weight of the assembly with servos is 15 oz.